集合
映射
函数
极限
无穷小与无穷大
极限的运算法则
极限存在的准则&两个重要的极限
函数的连续性和间断点
闭区间上连续的函数的性质
反函数与复合函数
作为逆映射的特例,有以下反函数的概念.
设函数$f:D→f(D)$是单射,则它的逆映射为$f^{-1}:f(D)→D$,称此映射$f^{-1}$为函数$f$的反函数. 按此定义,对于每个$y∈f(D)$,有唯一的$x∈D$,使得$f(x)=y$,于是有
$$f^{-1} (y)=x$$
这就是说,反函数$f^{-1}$的对应法则是完全由函数$f$所确定的.
例如,函数$y=x^3$是单射,它的反函数是$x = \root 3 \of y $很显然,反函数的对应法则$x = \root 3 \of y $完全由函数$y=x^3$确定.

习惯上,我们用$y$表示因变量,$x$表示自变量,因此$y=x^3$的反函数$x = \root 3 \of y $写为$y = \root 3 \of x $,相应的图像为:
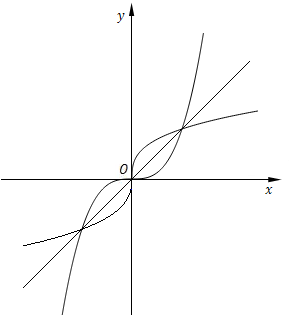
将函数$y=x^3$和它的反函数$y = \root 3 \of x $的图像画在同一坐标系中,我们发现,两者的图像关于直线$y=x$对称.
注意:前面我们讲到逆映射时,有两种映射存在逆映射:
单射:$\forall f:X \to Y\left( {{x_1} \ne {x_2},f\left( {{x_1}} \right) \ne f\left( {{x_2}} \right)} \right),\exists {f^{ - 1}}:{R_f} \to X.$
单射的逆映射是从单射的值域$R_f$到定义域的新映射,不是从单射值域的范围Y到定义域.
一一映射:$\forall f:X \to Y\left( {{x_1} \ne {x_2},f\left( {{x_1}} \right) \ne f\left( {{x_2}} \right),\forall y \in {R_f},\exists x \in X} \right),\exists {f^{ - 1}}:Y \to X.$
一一映射的逆映射是从一一映射值域的范围$Y$到定义域$X$的新映射.
在这里定义逆函数时,我们用到的条件是从单射到逆映射,符合逆映射的第1种情况.
注意值域的范围$Y$与值域$R_f$的区别.
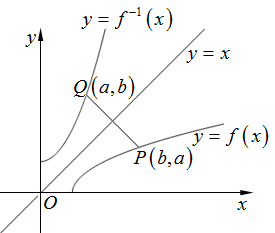
原函数与其逆函数具有相同的单调性.
把原来的函数称为直接函数,直接函数与逆函数的图像关于$y=x$轴对称.
关于$y=x$轴对称的点的坐标:点$Q(a,b)$关于直线$y=x$对称的点的坐标为$P(b,a)$
复合函数
复合函数是复合映射的一种特列,按照通常函数的记号,复合函数的概念可如下表述.
设函数$y=f(u)$的定义域为$D_f$,函数$u=g(x)$的定义域为$D_g$,且其值域${R_g} \subset {D_f}$ .则由下式确定的函数
$$y=f[g(x)],x∈D_g.$$
称为由函数函数$u=g(x)$与函数$y=f(u)$构成的复合函数,它的定义域为$D_g$,$u$变量称为中间变量.通常记为
$$({f^o}g)(x) = f[g(x)]$$
为了简便起见,在用数学表达式表示函数时,不再写出定义域的范围,其定义域是满足该复合函数的自然定义域.
例如函数$y = {\bf{sin}} (2x+1)$是由函数$y = {\bf{sin}} u$,$u=2x+1$复合而成.
函数的运算
设函数$f(x),g(x)$的定义域依次为${D_1},{D_2},D = {D_1} \cap {D_2} \ne $Ø,则我们可以定义这两个函数的下列运算:
和差:$f±g:(f±g)(x)=f(x)±g(x),x∈D$;
积:$f \cdot g:(f \cdot g)(x) = f(x) \cdot g(x),x \in D$;
商:$\frac{f}{g}:(\frac{f}{g})(x) = \frac{{f(x)}}{{g(x)}},x \in D\backslash \{ x|g(x) = 0,x \in D\} $
注意:${D_1} \cap {D_2} \ne $Ø是保证两个函数在上述运算时同时成立的条件,不可缺少.有时候会认为集合$\{ x|g(x) = 0,x \in D\} $中$x$应该是$x∈D_2$.实际上,在$(\frac{f}{g})(x) = \frac{{f(x)}}{{g(x)}}$中,$x \in D$,此时只需要将满足$x∈D$且使$g(x)=0$的$x$去掉,因此,$\{ x|g(x) = 0,x \in D\} $ 中$x∈D$是正确的.函数的运算是一个定义,不需要证明.或者说,函数的上述运算,实质上都是实数之间的加减乘除运算,要证明它们,显然就是证明为什么1+1=2的问题了.